- Contact geometry
-
- Contact form redirects here. For a web email form, see Form_(web)#Form-to-email_scripts.
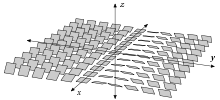 The standard contact structure on R3. Each point in R3 has a plane associated to it by the contact structure, in this case as the kernel of the one-form dz − y dx. These planes appear to twist along the y-axis.
The standard contact structure on R3. Each point in R3 has a plane associated to it by the contact structure, in this case as the kernel of the one-form dz − y dx. These planes appear to twist along the y-axis.
In mathematics, contact geometry is the study of a geometric structure on smooth manifolds given by a hyperplane distribution in the tangent bundle and specified by a one-form, both of which satisfy a 'maximum non-degeneracy' condition called 'complete non-integrability'. From the Frobenius theorem, one recognizes the condition as the opposite of the condition that the distribution be determined by a codimension one foliation on the manifold ('complete integrability').
Contact geometry is in many ways an odd-dimensional counterpart of symplectic geometry, which belongs to the even-dimensional world. Both contact and symplectic geometry are motivated by the mathematical formalism of classical mechanics, where one can consider either the even-dimensional phase space of a mechanical system or the odd-dimensional extended phase space that includes the time variable.
Contents
Applications
Contact geometry has — as does symplectic geometry — broad applications in physics, e.g. geometrical optics, classical mechanics, thermodynamics, geometric quantization, and applied mathematics such as control theory. One can prove amusing things, like 'You can always parallel-park your car, provided the space is big enough'.[citation needed] Contact geometry also has applications to low-dimensional topology; for example, it has been used by Kronheimer and Mrowka to prove the property P conjecture and by Gompf to derive a topological characterization of Stein manifolds.
Contact forms and structures
Given an n-dimensional smooth manifold M, and a point p ∈ M, a contact element of M with contact point p is an (n − 1)-dimensional linear subspace of the tangent space to M at p.[1][2] A contact element can be given by the zeros of a 1-form on the tangent space to M at p. However, if a contact element is given by the zeros of a 1-form ω, then it will also be given by the zeros of λω where λ ≠ 0. Thus, { λω : λ ≠ 0 } all give the same contact element. It follows that the space of all contact elements of M can be identified with a quotient of the cotangent bundle PT*M,[1] where:
A contact structure on an odd dimensional manifold M, of dimension 2k+1, is a smooth distribution of contact elements, denoted by ξ, which is generic at each point.[1][2] The genericity condition is that ξ is non-integrable.
Assume that we have a smooth distribution of contact elements, ξ, given locally by a differential 1-form α; i.e. a smooth section of the cotangent bundle. The non-integrability condition can be given explicitly as:[1]
Notice that if ξ is given by the differential 1-form α, then the same distribution is given locally by β = ƒ⋅α, where ƒ is a non-zero smooth function. If ξ is co-orientable then α is defined globally.
Properties
It follows from the Frobenius theorem on integrability that the contact field ξ is completely nonintegrable. This property of the contact field is roughly the opposite of being a field formed by the tangent planes to a family of nonoverlapping hypersurfaces in M. In particular, you cannot find a piece of a hypersurface tangent to ξ on an open set of M. More precisely, a maximally integrable subbundle has dimension n.
Relation with symplectic structures
A consequence of the definition is that the restriction of the 2-form ω = dα to a hyperplane in ξ is a nondegenerate 2-form. This construction provides any contact manifold M with a natural symplectic bundle of rank one smaller than the dimension of M. Note that a symplectic vector space is always even-dimensional, while contact manifolds need to be odd-dimensional.
The cotangent bundle T*N of any n-dimensional manifold N is itself a manifold (of dimension 2n) and supports naturally an exact symplectic structure ω = dλ. (This 1-form λ is sometimes called the Liouville form). There are two main ways to construct an associated contact manifold, one of dimension 2n − 1, one of dimension 2n + 1.
- Let M be the projectivization of the cotangent bundle of N: thus M is fiber bundle over a M whose fiber at a point x is the space of lines in T*N, or, equivalently, the space of hyperplanes in TN. The 1-form λ does not descend to a genuine 1-form on M. However, it is homogeneous of degree 1, and so it defines a 1-form with values in the line bundle O(1), which is the dual of the fibrewise tautological line bundle of M. The kernel of this 1-form defines a contact distribution. There are several ways of making this construction more explicit by making choices.
- Suppose that H is a smooth function on T*N. Then each level set,
-
- (q,p) ∈T*N : H(q,p) = E,
- is a contact manifold of dimension 2n − 1 at its smooth points (i.e. the points where the differential of H does not vanish). The contact form α is the restriction of the Liouville form to the level set. This construction originates in Hamiltonian mechanics, where H is a Hamiltonian of a mechanical system with the configuration space N and the phase space T*N, and E is the value of the energy.
- Choose a Riemannian metric on the manifold N. That allows one to consider the unit sphere in each cotangent plane, resulting in a unit cotangent bundle of N, which is a smooth manifold of dimension 2n-1. Then the Liouville form restricted to the unit cotangent bundle is a contact structure. This corresponds to a special case of the first construction, where the Hamiltonian is taken to be the square of the length of a vector in the cotangent bunle. The vector field R, defined by the equalities
-
- λ(R) = 1 and dλ(R, A) = 0 for all vector fields A,
- is called the Reeb vector field, and it generates the geodesic flow of the Riemannian metric. More precisely, using the Riemannian metric, one can identify each point of the cotangent bundle of N with a point of the tangent bundle of N, and then the value of R at that point of the (unit) cotangent bundle is the corresponding (unit) vector parallel to N.
- On the other hand, one can build a contact manifold M of dimension 2n + 1 by considering the first jet bundle of the real valued functions on N. This bundle is isomorphic to T*N×R using the exterior derivative of a function. With coordinates (x, t), M has a contact structure
- α = dt + λ.
Conversely, given any contact manifold M, the product M×R has a natural structure of a symplectic manifold. If α is a contact form on M, then
- ω = d(etα)
is a symplectic form on M×R, where t denotes the variable in the R-direction. This new manifold is called the symplectization (sometimes symplectification in the literature) of the contact manifold M.
Examples
As a prime example, consider R3, endowed with coordinates (x,y,z) and the one-form dz − y dx. The contact plane ξ at a point (x,y,z) is spanned by the vectors X1 = ∂y and X2 = ∂x + y ∂z.
By replacing the single variables x and y with the multivariables x1, ..., xn, y1, ..., yn, one can generalize this example to any R2n+1. By a theorem of Darboux, every contact structure on a manifold looks locally like this particular contact structure on the (2n + 1)-dimensional vector space.
An important class of contact manifolds is formed by Sasakian manifolds.
Legendrian submanifolds and knots
The most interesting subspaces of a contact manifold are its Legendrian submanifolds. The non-integrability of the contact hyperplane field on a (2n + 1)-dimensional manifold means that no 2n-dimensional submanifold has it as its tangent bundle, even locally. However, it is in general possible to find n-dimensional (embedded or immersed) submanifolds whose tangent spaces lie inside the contact field. Legendrian submanifolds are analogous to Lagrangian submanifolds of symplectic manifolds. There is a precise relation: the lift of a Legendrian submanifold in a symplectization of a contact manifold is a Lagrangian submanifold. The simplest example of Legendrian submanifolds are Legendrian knots inside a contact three-manifold. Inequivalent Legendrian knots may be equivalent as smooth knots.
Legendrian submanifolds are very rigid objects; in some situations, being Legendrian forces submanifolds to be unknotted. Symplectic field theory provides invariants of Legendrian submanifolds called relative contact homology that can sometimes distinguish distinct Legendrian submanifolds that are topologically identical.
Reeb vector field
If α is a contact form for a given contact structure, the Reeb vector field R can be defined as the unique element of the kernel of dα such that α(R) = 1. Its dynamics can be used to study the structure of the contact manifold or even the underlying manifold using techniques of Floer homology such as symplectic field theory and embedded contact homology.
Some historical remarks
The roots of contact geometry appear in work of Christiaan Huygens, Isaac Barrow and Isaac Newton. The theory of contact transformations (i.e. transformations preserving a contact structure) was developed by Sophus Lie, with the dual aims of studying differential equations (e.g. the Legendre transformation or canonical transformation) and describing the 'change of space element', familiar from projective duality.
See also
- Embedded contact homology
References
- ^ a b c d Arnold, V. I. (1989), Mathematical Methods of Classical Mechanics, Springer, pp. 349 − 370, ISBN 0387968903
- ^ a b Arnold, V. I. (1989). "Contact Geometry and Wave Propagation" (in English). Monographie de L'Enseignement Mathématique. Conférences de l'Union Mathématique Internationale (Univ. de Genève). http://www.zentralblatt-math.org/zmath/en/search/?q=an:0694.53001&format=complete.
Introductions to contact geometry
- Etnyre, J. Introductory lectures on contact geometry, Proc. Sympos. Pure Math. 71 (2003), 81–107, math.SG/0111118
- Geiges, H. Contact Geometry, math.SG/0307242
- Geiges, H. An Introduction to Contact Topology, Cambridge University Press, 2008.
- Aebischer et al. Symplectic geometry, Birkhäuser (1994), ISBN 3-7643-5064-4
- V. I. Arnold, Mathematical Methods of Classical Mechanics, Springer-Verlag (1989), ISBN 0-387-96890-3
Applications to differential equations
- V. I. Arnold, Geometrical Methods In The Theory Of Ordinary Differential Equations, Springer-Verlag (1988), ISBN 0-387-96649-8
Contact three-manifolds and Legendrian knots
- William Thurston, Three-Dimensional Geometry and Topology. Princeton University Press(1997), ISBN 0-691-08304-5
Information on the history of contact geometry
- Lutz, R. Quelques remarques historiques et prospectives sur la géométrie de contact , Conf. on Diff. Geom. and Top. (Sardinia, 1988) Rend. Fac. Sci. Univ. Cagliari 58 (1988), suppl., 361–393.
- Geiges, H. A Brief History of Contact Geometry and Topology, Expo. Math. 19 (2001), 25–53.
- Arnold, V.I. (trans. E. Primrose), Huygens and Barrow, Newton and Hooke: pioneers in mathematical analysis and catastrophe theory from evolvents to quasicrystals. Birkhauser Verlag, 1990.
- Contact geometry Theme on arxiv.org
Categories:- Contact geometry
- Differential systems
- Differential topology
- Structures on manifolds
- Symplectic geometry



Wikimedia Foundation. 2010.