- Motion simulator
-

A motion simulator or motion platform is a mechanism that encapsulates occupants and creates the effect/feelings of being in a moving vehicle. Motion simulators fall into two categories (described below) based on whether the occupant is controlling the vehicle, the more common case for a system described as a simulator; or if the occupant is a passive rider, also referred to as a simulator ride or motion theater.
- Examples of a typical (occupant controlled) motion simulator are flight simulators and car/truck vehicle simulators. However, motion applications have moved beyond auto racing and flight sim to include boats, motorcycles, rollercoasters, tanks, ATVs, and spaceships among many other craft types.[1]
- Examples of passive ride simulators are theme park rides where an entire theater system; with a projection screen in front of the seats, is in motion on giant actuators. An Enhanced motion vehicle moves the motion base along a track in a show building. See simulator ride and the Ride Simulator section of this article for more details of passive motion simulators.
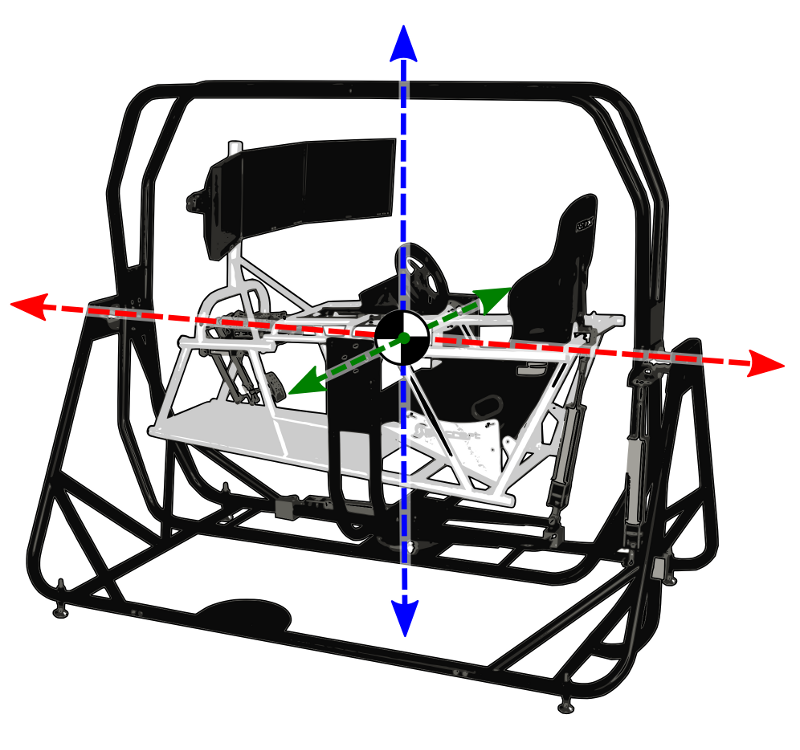
A motion simulator can also be called a motion base, motion chassis or a motion seat.[2] The movement is synchronous with visual display and is designed to add a tactile, or sense of touch, element to video gaming, simulation, and virtual reality. When motion is applied and synchronized to audio and video signals, the result is a combination of sight, sound, and touch.[3] All full motion simulators move the entire occupant compartment[3] and convey not only a change in orientation but also produces the effect of false gravitational forces. These motion cues trick the mind[4] into thinking it is immersed in the simulated environment and experiencing kinematic changes in position, velocity, and acceleration. Failure of the mind to accept the experience can result in motion sickness.[2] Motion platforms can provide movement on up to six degrees of freedom[2]: three rotational degrees of freedom; roll; pitch; yaw; and three (3) translational or linear degrees of freedom; surge; heave; sway. Motion is being applied to an increasing variety of video gaming applications, a visit to a modern video game arcade reveals that gaming in motion is everywhere.[citation needed]
Summary of advantages and disadvantages of motion simulator
Advantages
- Motion systems provide a means of safety for training (i.e. pilots).
- The expense of training on real equipment, even if somehow in a safe environment, can be much more expensive than even the most expensive simulators.
- Time in between training sessions may be reduced since it may be as simple as an initial conditions reset and zero'ing out the motion platform.
- From the entertainment perspective, people are able to experience activities otherwise unavailable to them, such as parasailing in CA or driving a F1 car.
Disadvantages
- True environment is not mimicked identically, therefore the pilot/rider may be confused by the lack of expected sensations or not properly prepared for the real environment.
- Complexity of lining up all sensor inputs to eliminate or at least mitigate risk of "simulator sickness."[5]
- Age of participant as well as amount of experience in true environment modifies reactions to simulated environment.[5]
Different types of motion platforms[6]
 6DOF High Fidelity, Professional Stewart Hybrid Type Motion System
6DOF High Fidelity, Professional Stewart Hybrid Type Motion System
Motion platforms historically have spanned a broad spectrum in scale and cost. Those in the category of amusement park rides and commercial and military aircraft simulators are at the high end of this spectrum with arcade style amusement devices falling into the middle of the spectrum while smaller and lower-costing home based motion platforms comprising the other end.
While modern motion platforms have become complicated machines, motion platforms have much simpler roots. Many of the early motion platforms were flight simulators used to train pilots.[7] One of the first motion platforms, the Sanders Teacher, was created in 1910. The Sanders Teacher was an aircraft with control surfaces fitted to the ground by a simple universal joint. When wind was present, the pilot in training was able to use the control surfaces to move the simulator in the three rotational degrees of freedom. Around 1930, a large advancement in motion platforms was made with the creation of the Link Trainer. The Link Trainer used the control stick and external motors to control organ bellows located under the simulator. The bellows could inflate or deflate, causing the simulator to rotate with three degrees of freedom. In 1958 the Comet IV was designed using a 3 degree of freedom hydraulic system. After the Comet IV both the range of motion and the degrees of freedom exhibited by motion platforms was increased. The most expensive motion platforms utilize high fidelity six degree of freedom motion, often coupled with advanced audio and visual systems. Today you will find motion platforms in many applications including: flight simulation, driving simulation, amusement rides, and even small home based motion platforms.
The high-end motion platform has been used in conjunction with military and commercial flight instruction and training applications. However, today you will find multiple occupant entertainment applications in theme parks throughout the world. The systems used in these applications are very large, weighing several tons typically housed in facilities designed expressly for them. As a result of the force required to move the weight of these larger simulator systems and one or more occupants, the motion platform must be controlled by powerful and expensive hydraulic or electromagnetic cylinders. The cost of this type of motion platform exceeds $100,000 US dollars, and often goes well into the millions for a multi-occupant system found at major theme park attractions. The complexity of these systems require an extensive amount of programming and maintenance, which further extends the cost associated with this type of motion platform.
 three rotational DOF low cost home motion system
three rotational DOF low cost home motion systemThe most typical high-end motion system that provides full 6 degrees of freedom (3 translation and 3 rotation) is the Stewart platform, which employs sophisticated algorithms to provide high fidelity motions and accelerations. These are used in a number of applications, including Flight simulators for training pilots. However, the complexity and expensive mechanisms required to incorporate all degrees of freedom has led to alternative motion simulation technology using mainly the three rotational degrees of freedom. An analysis of capabilities of these systems reveals that a simulator with three rotational degrees of freedom is capable of producing motion simulation quality and vestibular motion sensations comparable to that produced by a Stewart platform.[8] Historically these systems used hydraulics or pneumatics, however many modern systems use electric actuators.
The middle of the spectrum includes a number of disclosures involving powered motion platforms aimed at arcade style amusement games, rides, and other arrangements. These systems fall into a price range from $10,000 to $99,000 USD. Typically the space requirements for such a platform are modest requiring only a portion of an arcade room and a smaller range of motion is provided via similar, less expensive, control systems than the high-end platforms.
The lower-cost systems include home-based motion platforms, which have recently become a more common device used to enhance video games, simulation, and virtual reality. These systems fall into a price range from $1,000 to $9,000 USD. Within the first decade of the twenty-first century, several individuals and business entities have developed these smaller, more affordable motion systems. Most of these systems were developed mainly by flight simulation enthusiasts, were sold as do it yourself projects, and could be assembled in the home from common components for around one thousand US dollars ($1,000).[9] Recently, there has been increased market interest in motion platforms for more personal, in-home, use. The application of these motion systems extends beyond just flight training simulation into a larger market of more generalized "Craft-Oriented" simulation, entertainment, and virtual reality systems.[8]
Common uses
Engineering analysis
Motion platforms are commonly used in the field of engineering for analysis and verification of vehicle performance and design. The ability to link a computer based dynamic model of a particular system to physical motion gives the user the ability to feel how the vehicle would respond to control inputs without the need to construct expensive prototypes. For example, an engineer designing an external fuel tank for an aircraft could have a pilot determine the effect on flying qualities or a mechanical engineer could feel the effects of a new brake system without building any hardware, saving time and money.
Flight simulators are also used by aircraft manufacturers to test new hardware. By connecting a simulated cockpit with visual screen to a real flight control system in a laboratory, integrating the pilot with the electrical, mechanical, and hydraulic components that exist on the real aircraft, a complete system evaluation can be conducted prior to initial flight testing. This type of testing allows the simulation of "seeded faults" (i.e. an intentional hydraulic leak, software error, or computer shutdown) which serve to validate that an aircraft's redundant design features work as intended. A test pilot can also help identify system deficiencies such as inadequate or missing warning indicators, or even unintended control stick motion. This testing is necessary to simulate extremely high risk events that cannot be conducted in flight but nonetheless must be demonstrated. While 6 degree-of-freedom motion is not necessary for this type of testing, the visual screen allows the pilot to "fly" the aircraft while the faults are simultaneously triggered.
Ride simulators
Main article: Simulator rideMotion simulator technology also exists in theme parks, such as in the Disney Parks and in Universal Studios Theme Parks. They have the purpose of giving the park guests a simulation of flight or motion.
Some examples are:
- Star Tours and its sequel at Disneyland and other Disney Theme Parks, which use purpose-modified military flight simulators (known as ATLAS) to simulate a flight through outer space.
- Soarin' Over California is located in Disney's California Adventure. This uses an Imax dome screen and a hang glider simulation to provide a beautiful simulated flight over many of California's scenic places.
- StormRider at Tokyo DisneySea.
- Star Trek: The Experience is located at the Las Vegas Hilton. Its "Klingon Encounter" culminates with a state of the art 6 degrees-of-freedom flight simulator ride including associated space battle movie footage. Star Trek: The Experience was closed, and while for a time it appeared it would move and reopen, it is now closed permanently.
- Back To The Future: The Ride is now closed at both the Florida and Hollywood Universal Studios. The ride used DeLorean based simulator cars and a 70 ft tall IMAX dome screen to project footage. It was replaced by another motion simulator, The Simpsons Ride.
- The Funtastic World of Hanna-Barbera is now closed at the Universal Studios Florida park. The ride used rocket based simulator cars and a theater sized screen to project footage.
- Jimmy Neutron's Nicktoon Blast is located at the Universal Studios Florida theme park in Orlando, Florida. The ride uses rocket based simulator cars and a theater sized screen to project footage
- Smithsonian National Air & Space Museum Flight Simulator Gallery in Washington D.C.National Air and Space Museum Gallery full of two-seat interactive flight simulators doing 360 degree barrel rolls in air combat. [1], [2]
- Europe in the Air is located in Busch Gardens Williamsburg. This uses one platform to move the entire ride, as well as using wind effects. The ride is used to simulate flight over Europe's notable icons.
Video Games
The aspects of game play can be associated with your basic human senses – traditionally sight and sound. When the video game environment makes a sound, the sound is heard by an attached audio system. When the game shows a race car hugging a curve on the video output screen and the user sees the car taking the curve. Some driving and flying simulation games allow the use of specialized controllers such as steering wheels, foot pedals or joysticks. The controllers designed in recent years provide tactile realtime feedback to the user depending on the dynamics of game. Recently, small imbalanced motors were inserted into the common game controller. The idea was to add a feel sense to the sight and sound of game playing. This concept is called haptic technology. When the car crashes into the wall, the controller motors spin and the driver of the car, in this case the game player, feels vibration in response to the car crashing. This vibration coupled with the sight and sounds of the car crashing was designed to enhance the user experience by increasing the level of stimulation for the player. A motion simulator takes the next step by providing the player a full body touch sensation. If a player sits in a motion gaming chair playing a racing game, the player will hear, and feel like he or she is driving a virtual car. The motion chair can roll to the left and right as it turns corners. It also pitches forward and backward as it simulates accelerations and deceleration. Motion platforms provide for a much more stimulative and potentially realistic gaming experience, what some call a virtual tactile gaming simulation, and allow for even greater physical correlation to sight and sound in game play.
How human physiology processes and responds to motion[10]
The way we perceive our body and our surroundings is a function of the way our brain interprets signals from our various sensory systems, such as sight, sound, and touch. Special sensory pick-up units (or sensory "pads") called receptors, translate stimuli into sensory signals. External receptors (exteroceptors) respond to stimuli that arise outside the body, such as the light that stimulates the eyes, sound pressure that stimulates the ear, pressure and temperature that stimulates the skin and chemical substances that stimulate the nose and mouth. Internal receptors (enteroceptors) respond to stimuli that arise from within blood vessels.
Postural stability is maintained through the vestibular reflexes acting on the neck and limbs. These reflexes, which are key to successful motion synchronization, are under the control of three classes of sensory input:
- Proprioceptors - receptors located in your muscles, tendons, joints and the inner ear, which send signals to the brain regarding the body's position. Aircraft pilots often refer to this type of sensory input as the “seat of your pants.”
- Vestibular system - Contributes to balance and sense of spatial orientation and includes the vestibular organs, ocular system, and muscular system. The vestibular system is contained in the inner ear and interprets rotational motion and linear acceleration. The vestibular system does not interpret vertical motion.
- Visual inputs - from the eye relays information to the brain about the craft's position, velocity, and attitude relative to the ground.
Proprioceptors[10]
Proprioceptors are receptors located in your muscles, tendons, joints and the inner ear, which send signals to the brain regarding the body's position. An example of a "popular" proprioceptor often mentioned by aircraft pilots, is the "seat of the pants". In other words, these sensors present a picture to your brain as to where you are in space as external forces act on your body. Proprioceptors respond to stimuli generated by muscle movement and muscle tension. Signals generated by exteroceptors and proprioceptors are carried by sensory neurons or nerves and are called electrochemical signals. When a neuron receives such a signal, it sends it on to an adjacent neuron through a bridge called a synapse. A synapse "sparks" the impulse between neurons through electrical and chemical means. These sensory signals are processed by the brain and spinal cord, which then respond with motor signals that travel along motor nerves. Motor neurons, with their special fibres, carry these signals to muscles, which are instructed to either contract or relax.
The downfall with our internal motion sensors is that once a constant speed or velocity is reached, these sensors stop reacting. Your brain now has to rely on visual cues until another movement takes place and the resultant force is felt. In motion simulation, when our internal motion sensors can no longer detect motion, a “washout” of the motion system may occur. A washout allows the motion platform occupant to think they are making a continuous movement when actually the motion has stopped. In other words, washout is where the simulator actually returns to a central, home, or reference position in anticipation of the next movement. This movement back to neutral must occur without the occupant actually realizing what is happening. This is an important aspect in motion simulators as the human feel sensations must be as close to real as possible.
Vestibular system[10]
 Figure 1 The labyrinth of the inner ear, from the left ear. It contains i) the cochlea (yellow), which is the peripheral organ of our auditory system; ii) the semicircular canals (brown), which transduce rotational movements; and iii) the otolithic organs (in the blue/purple pouches), which transduce linear accelerations. The light blue pouch is the endolymphatic sac, and contains only fluid.
Figure 1 The labyrinth of the inner ear, from the left ear. It contains i) the cochlea (yellow), which is the peripheral organ of our auditory system; ii) the semicircular canals (brown), which transduce rotational movements; and iii) the otolithic organs (in the blue/purple pouches), which transduce linear accelerations. The light blue pouch is the endolymphatic sac, and contains only fluid.The Vestibular system is the balancing and equilibrium system of the body that includes the vestibular organs, ocular system, and muscular system. The vestibular system is contained in the inner ear. It consists of three semicircular canals, or tubes, arranged at right angles to one another. Each canal is lined with hairs connected to nerve endings and is partially filled with fluid. When the head experiences acceleration the fluid moves within the canals causing the hair follicles to move from their initial vertical orientation. In turn the nerve endings fire resulting in the brain interpreting the acceleration as pitch, roll, or yaw.
There are, however, two shortcomings to this clever piece of biological engineering. First, if the head experiences sustained accelerations on the order of 10 – 20 seconds, the hair follicles return to the “zero” or vertical position and the brain interprets this as the acceleration ceasing. Additionally, there is a lower acceleration threshold of about 2 degrees per second that the brain cannot perceive. In other words, slow and gradual enough motion below the threshold will not affect the vestibular system. As discussed in the preceding “Proprioceptors” section, this shortfall actually allows the simulator to return to a reference position an anticipation of the next movement.
Visual inputs[10]
The human eye is the most important source of information in motion simulation. The eye relays information to the brain about the craft's position, velocity, and attitude relative to the ground. As a result, it is essential for realistic simulation that the motion works in direct synchronization to what is happening on the video output screen. Time delays cause disagreement within the brain, due to error between the expected input and the actual input given by the simulator. This disagreement can lead to dizziness, fatigue and nausea in some people.
For example, if the occupant commands the vehicle to roll to the left, the visual displays must also roll by the same magnitude and at the same rate. Simultaneously, the cab tilts the occupant to imitate the motion. The occupant’s proprioceptors and vestibular system sense this motion. The motion and change in the visual inputs must align well enough such that any discrepancy is below the occupant’s threshold to detect the differences in motion.
In order to be an effective training or entertainment device, the cues the brain receives by each of the body’s sensory inputs must agree.
Putting it together - how simulator tricks the body to work[11]
It is physically impossible to correctly simulate large scale ego-motion in the limited space of a laboratory. The standard approach to simulate motions (so called motion cueing) is to simulate the “relevant” cues as closely as possible, especially the acceleration of an observer. Visual and auditory cues enable humans to perceive their location in space on an absolute scale. On the other hand, the somatosensory cues, mainly proprioception and the signals from the vestibular system, code only relative information. But fortunately (for our purpose), humans cannot perceive accelerations and velocities perfectly and without systematic errors. And this is where the tricky business of motion simulation starts. We can use those imperfections of the human sensory and perceptual systems to cheat intelligently.
Linear movements
In principle, velocity cannot be directly perceived by relative cues alone, like those from the vestibular system. For such a system, flying in space with some constant velocity is not different from sitting in a chair. However, changing the velocity is perceived as acceleration, or force acting on the human body. For the case of constant linear acceleration, a substitute for the real situation is simple. Since the amplitude of the acceleration is not very well perceived by humans, one can tilt the subject backwards and use the gravity vector as a replacement for correct resulting force from gravity and forward acceleration. In this case, leaning backwards is therefore not perceived differently from being constantly accelerated forwards.
Linear Accelerations[12]
Linear accelerations are detected by otoliths. The otolith structure is simpler than the three-axis semicircular canals that detect angular accelerations. The otoliths contain calcium carbonate particles that lag behind head movement, deflecting hair cells. These cells transmit motion information to the brain and oculomotor muscles. Studies indicate that the otoliths detect the tangential component of the applied forces. A transfer function model between the perceived force y(s) and the applied forces f(s) is given by:

Based on centrifuge experiments, threshold values of 0.0011 ft/s2 have been reported; values up to 0.4 ft/s2 have been reported based on airborne studies in the USSR. The same studies suggest that the threshold is not a linear acceleration but rather a jerk motion (third time derivative of position), and the reported threshold value is on the order of 0.1 ft/s3.
Rotational movements
Unfortunately, there is no easy way of cheating for rotations. Hence, many motion simulations try to avoid the problem by avoiding quick and large rotations altogether. The only convincing way of simulating larger turns is an initial yaw rotation above threshold and a back-motion below threshold. For roll and pitch, the static (otolithic) cues cannot be modified easily due to the ambiguity of linear accelerations and changes in gravitational direction. In real life, the ambiguity is resolved by using the dynamical properties of the vestibular and other sensory signals (most importantly, vision).
Angular accelerations[12]
Angular accelerations are detected by semicircular canals while linear accelerations are detected by another structure in the inner ear called the otolith.
The three semicircular canals are mutually orthogonal (similar to three-axis accelerometer) and are filled with a fluid called the endolymph. In each canal, there is a section where the diameter is larger than the rest of the canal. This section is called the ampulla and is sealed by a flap called the cupula. Angular accelerations are detected as follows: an angular acceleration causes the fluid in the canals to move, deflecting the cupula. The nerves in the cupula report the motion to both the brain and oculomotor muscles, stabilizing eye movements. A transfer function model between the perceived angular displacement y(s) and the actual angular displacement phi(s) is:

A second-order model of the angle of the cupula θ is given by

where ζ is the damping ratio, ωn is the natural frequency of the cupula, and u(t) is the input angular acceleration. Values of ζ have been reported to be between 3.6 and 6.7 while values of ωn have been reported to be between 0.75 and 1.9. Thus, the system is overdamped with distinct, real roots. The shorter time constant is 0.1 seconds, while the longer time constant depends on the axis about which the test subject is accelerating (roll, pitch, or yaw). These time constants are one to two orders of magnitude greater than the shorter time constant.
Experiments have shown that angular accelerations below a certain level cannot be detected by a human test subject. Values of
 have been reported for pitch and roll accelerations in a flight simulator.
have been reported for pitch and roll accelerations in a flight simulator.Implications
The above studies indicate that the pilot's vestibular system detects accelerations before the aircraft instruments displays them. This can be considered an inner control loop in which the pilots responds to accelerations that occur in full-motion simulators and aircraft, but not in fixed simulators. This effect shows that there is a potential negative training transfer when transitioning from a fixed-based simulator to an aircraft and indicates the need for motion systems for pilot training.
It is physically impossible to precisely simulate large scale egomotion in the limited space of a laboratory. There is simply no way around the physics. However, by exploiting some of the imperfections of the body’s sensory and perceptual systems, it is possible to create an environment in which the body perceives motion without actually moving the subject more than a few feet in any one direction. This is where the tricky business of motion simulation begins.
The standard approach to simulating motion (so called motion cueing) is to simulate the “relevant” cues as closely as possible which trigger motion perception. These cues can be visual, auditory, or somatosensory in nature. Visual and auditory cues enable humans to perceive their location in space on an absolute scale, whereas somatosensory cues (mainly proprioception and other signals from the vestibular system) provide only relative feedback. Fortunately for us, humans cannot perceive velocity and acceleration directly without some form of error or uncertainty.
For example, consider riding in a car traveling at some arbitrary constant speed. In this situation, our sense of sight and sound provide the only cues (excluding engine vibration) that the car is moving; no other forces act on the passengers of the car except for gravity. Next, consider the same example of a car moving at constant speed except this time, all passengers of the car are blindfolded. If the driver were to step on the gas, the car would accelerate forward thus pressing each passenger back into their seat. In this situation, each passenger would perceive the increase in speed by sensing the additional pressure from the seat cushion. However, if the car were traveling in reverse and the driver stepped on the brake pedal instead of the gas, the deceleration of the vehicle would create the same feeling of increased pressure from the seat cushion as in the case of acceleration that the passengers would be unable to distinguish which direction the vehicle is actually moving.
Summary of most commonly used “tricks”
- Moving the observer below detection threshold to gain additional simulation space
- Trading the gravity vector for acceleration (tilting the seat)
- Masking not-to-be-detected motions by noise (i.e., vibrations and jitter)
- Guiding the attention of the observer away from the imperfections of the motion simulation
Impact
Impact of motion in simulation and gaming[6][10]
The use of physical motion applied in flight simulators has been a debated and researched topic. The Engineering department at the University of Victoria, conducted a series of tests in the 1980s, to quantify the perceptions of airline pilots in flight simulation and the impact of motion on the simulation environment. In the end, it was found that there was a definite positive effect on how the pilots perceived the simulation environment when motion was present and there was almost unanimous dislike for the simulation environment that lacked motion.[13] A conclusion that could be drawn on the findings of the Response of Airline Pilots study is that the realism of the simulation is in direct relationship to the accuracy of the simulation on the pilot. When applied to video gaming and evaluated within our own gaming experiences, realism can be directly related to the enjoyment of a game by the game player. In other words – motion enabled gaming is more realistic, thus more iterative and more stimulating. However, there are adverse effects to the use of motion in simulation that can take away from the primary purpose of using the simulator in the first place such as Motion Sickness. For instance, there have been reports of military pilots throwing off their vestibular system because of moving their heads around in the simulator similar to how they would in an actual aircraft to maintain their sensitivity to accelerations. However, due to the limits on simulator acceleration, this effect becomes detrimental when transitioning back to a real aircraft.
The aspects of game play can be associated with your basic human senses – traditionally sight and sound. When the video game environment makes a sound, the sound is heard by an attached audio system. When the game shows a race car hugging a curve on the video output screen and the user sees the car taking the curve. Recently, a couple of small lopsided motors were inserted into the common game controller. The idea was to add a feel sense to the sight and sound of game playing. This concept is called haptic technology. When the car crashes into the wall, the controller motors spin and the driver of the car, in this case the game player, feels vibration in response to the car crashing. This vibration coupled with the sight and sounds of the car crashing was designed to enhance the user experience by increasing the level of stimulation for the player. A motion simulator takes the next step by providing the player a full body touch sensation. If a player sits in a motion gaming chair playing a racing game, the player will hear, and feel like he or she is driving a virtual car. The motion chair can roll to the left and right as it turns corners. It also pitches forward and backward as it simulates accelerations and deceleration. Motion platforms provide for a much more stimulative and potentially realistic gaming experience, what some call a virtual tactile gaming simulation, and allow for even greater physical correlation to sight and sound in game play.
Adverse effects (simulator sickness)
Motion or Simulator Sickness: Simulators work by “tricking” the mind into believing that the inputs it is receiving from visual, vestibular and proprioceptive inputs are a specific type of desired motion. When any of the cues received by the brain do not correlate with the others, motion sickness can occur. In principle, simulator sickness is simply a form of motion sickness that can result from discrepancies between the cues from the three physical source inputs. For example, riding on a ship with no windows sends a cue that the body is accelerating and rotating in various directions from the vestibular system, but the visual system sees no motion since the room is moving in the same manner as the occupant. In this situation, many would feel motion sickness.
Along with simulator sickness, additional symptoms have been observed after exposure to motion simulation. These symptoms include feelings of warmth, pallor and sweating, depression and apathy, headache and fullness of head, drowsiness and fatigue, difficulty focusing eyes, eye strain, blurred vision, burping, difficulty concentrating, and visual flashbacks. Lingering effects of these symptoms were observed to sometimes last up to a day or two after exposure to the motion simulator.
Contributing factors to simulator sickness
Several factors contribute to simulation sickness, which can be categorized into human variables, simulator usage, and equipment. Common human variable factors include susceptibility, flight hours, fitness, and medication/drugs. An individual’s variance in susceptibility to motion sickness is a dominant contributing factor to simulator sickness. Increasing flight hours is also an issue for pilots as they become more accustomed to the actual motion in a vehicle. Contributing factors due to simulator usage are adaptation, distorted or complicated scene content, longer simulation length, and freeze/reset. Freeze/reset refers to the starting or ending points of a simulation, which should be as close to steady and level conditions as possible. Clearly, if a simulation is ended in the middle of an extreme maneuver then the test subjects IMU system is likely to be distorted. Simulator equipment factors that contribute to motion sickness are quality of motion system, quality of visual system, off-axis viewing, poorly aligned optics, flicker, and delay/mismatch between visual and motion systems. The delay/mismatch issue has historically been a concern in simulator technology, where time lag between pilot input and the visual and motion systems can cause confusion and generally decrease simulator performance.>
Debate over performance enhancement from motion simulators
In theory, the concept of motion simulators seem self explanatory: if the perception of events can be mimicked exactly, they will provide the user an identical experience. However, this ideal performance is next to impossible to achieve. Although the motion of vehicles can be simulated in 6 degrees of freedom (all that should be required to mimic motion), the impacts of simulated motion on pilots, and operators in many other fields, often leave trainees with a multitude of adverse side effects not seen in un-simulated motion. Further, there are many scenarios which may be difficult to simulate in training simulators exposing a concern that replacing real world exposure with motion simulations may be inadequate.
Due to the exorbitant cost of adding motion to simulators, military programs have established research units to investigate the impact of “skill acquisition” with the use of motion simulators. These units have provided results as recent as 2006 despite the use motion simulators over the last century. From an Army study, it was determined that “motion-based simulators are recommended for training when individuals must continue to perform skill-based tasks…while the ground vehicle negotiates rough terrain.”[14] However, if individuals are not required to negotiate rough terrain, or motion sickness does not detract from performance in the field, then “motion is not recommended.”[14]
The existence of adverse side effects of virtual environments has spawned a plethora of studies from predicting and measuring the impact of the side effects to identifying their specific causes.[15]
See also
- Degrees of Freedom (mechanics)
- Driving Simulators
- Flight Simulators
- Kinematics
- Motion Sickness
- Stewart Platform
- Vestibular System
External links
- Modern 5D motion simulation cinema - India
- Next Generation Flight Simulation
- Star Tours Website
Sources
- ^ Rollings, Andrew; Ernest Adams (2003). Andrew Rollings and Ernest Adams on Game Design. New Riders Publishing. pp. 395–415. ISBN 1-59273-001-9. http://proquest.safaribooksonline.com/1592730019/ch13.
- ^ a b c "Motion Platforms or Motion Seats?". Phillip Denne, Transforce Developments Ltd. 2004-09-01. http://www.guilden.com/phillipdenne/PDF/motion-platforms-or-motion-seats.pdf.
- ^ a b "Motion Systems and Visual Displays". Phillip Denne. 1994-01-12. http://www.guilden.com/phillipdenne/PDF/motion-systems-and-visual-displays.pdf.
- ^ Scanlon, Charles H. (1987-12) (PDF). Effect of Motion Cues During Comples Curved Approach and Landing Tasks. NASA. pp. 6–9. http://handle.dtic.mil/100.2/ADA279627. Retrieved 2009-07-19.
- ^ a b U.S. Army Research Institute for the Behavioral and Social Sciences (2005-4). "Introduction to and Review of Simulator Sickness Research". http://www.hqda.army.mil/ari/pdf/RR%201832.pdf.
- ^ a b "SimCraft :: Military Grade Full Motion Simulators for SimRacing and FlightSim". SimCraft Corporation. 2006-06-12. http://www.simcraft.com.
- ^ Page, Ray L. “Brief History of Flight Simulation.” In SimTechT 2000 Proceedings. Sydney: The SimtechT 2000 Organizing and Technical Committee, 2000
- ^ a b Nicolas A. Pouliot; Clément M. Gosselin; Meyer A. Nahon (1998-01). "Motion Simulation Capabilities of Three-Degree-of-Freedom Flight Simulators". Journal of Aircraft 35 (1): 9–17. doi:10.2514/2.2283.
- ^ "SimCraft DIY". sourceforge.net. 2008-12-08. http://sourceforge.net/projects/simcraftdiy.
- ^ a b c d e "Motion Platforms". Moorabbin Flying Services. 2006-06-12. http://www.mfs.com.au/MFS_Motion_Platforms.htm.
- ^ Markus von der Heyde & Bernhard E. Riecke (2001-12). "how to cheat in motion simulation – comparing the engineering and fun ride approach to motion cueing". http://citeseerx.ist.psu.edu/viewdoc/download?doi=10.1.1.8.9350&rep=rep1&type=pdf.
- ^ a b "Allerton, D. (2009). Principles of Flight Simulation. John Wiley & Sons, Ltd.
- ^ Lloyd D Reid; Meyer A. Nahon (1988-07). "Response of airline pilots to variations in flight simulator motion algorithms". Journal of Aircraft 25 (7): 639–646. doi:10.2514/3.45635.
- ^ a b "Effects of Motion on Skill Acquisition in Future Simulators". DTIC. http://www.dtic.mil/cgi-bin/GetTRDoc?Location=U2&doc=GetTRDoc.pdf&AD=ADA452066.
- ^ Michael K. McGee. "Assessing Negative Side Effects in Virtual Environments".
Categories:


Wikimedia Foundation. 2010.